



Descripción
L293D
Este puente H (etapa de potencia) para motores de corriente directa es capaz de controlar 4 motores en un sólo sentido y 2 motores de manera bidireccional y esta listo para ser utilizado con PWM (Modulación en Ancho de Pulso).
Es ideal para el control de motores en robótica.
CARACTERÍSTICAS
- Corriente de salida de 600 mA por canal
- Corriente pico de salida 1.2 A por canal (no repetitiva)
- Pines de Habilitación
- Alta inmunidad al ruido
- Fuentes de alimentación separadas
- Protección contra exceso de temperatura
- Diodos de protección incorporados
- Empaquetado: Tipo DIP
- Dimensiones: 14 x 3 x 2 mm
- Peso: 1 g C / U
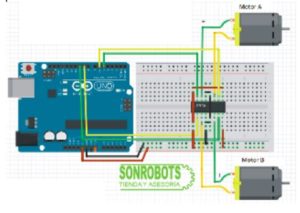
Código
//L293D
//Motor A
const int motorPin1 = 5; // Pin 14 of L293
const int motorPin2 = 6; // Pin 10 of L293
//Motor B
const int motorPin3 = 10; // Pin 7 of L293
const int motorPin4 = 9; // Pin 2 of L293
void setup(){
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
//A Adelante 2 seg.
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(2000);
//A Atrás 2 seg
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(2000);
//B Adelante 2 seg.
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
delay(2000);
//B Atrás 2 seg
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
delay(2000);
//Detener motores
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
}




Valoraciones
No hay valoraciones aún.