




Descripción
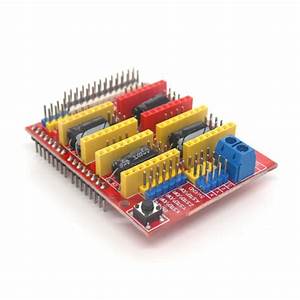
Instrucciones para el Shield FZ1350 CNC compatible con Arduino
Cosas importantes a tener en cuenta antes de empezar:
- Compruebe la polaridad de la entrada de alimentación («+» y «-«)
- Tenga en cuenta la orientación de los controladores de paso, recuerda que el potenciómetro (pot) del A4988 y el DRV8825 están en el lado opuesto
Comprobación previa
1. Haz una comprobación visual de todos los puntos de soldadura de la nueva placa
2. Conecte la placa a una placa Arduino y cargue el firmware de GRBL siguiendo los pasos siguientes:
- Descarga el código fuente de GRBL. Descárgalo aquí
- Descomprime la descarga y tendrás una carpeta llamada «grbl-master»
- Inicia el IDE de Arduino. (Asegúrate de que estás utilizando la versión más reciente del IDE de Arduino).
- Cargue GRBL en el IDE de Arduino como una biblioteca. (Haz clic en el menú desplegable «Sketch», luego navega hasta «Incluir biblioteca», y selecciona «Añadir biblioteca .ZIP»)
- IMPORTANTE: Selecciona la carpeta «Grbl» dentro de la carpeta «grbl-master», que sólo contiene los archivos fuente y un directorio de ejemplo. (Si accidentalmente seleccionas el archivo .zip o la carpeta equivocada, tendrás que navegar a tu biblioteca Arduino, borrar el error y volver a hacer este paso).
- Abra el ejemplo de Arduino «GrblUpload». (Haz clic en el menú desplegable «archivo», navega hasta «Ejemplos->Grbl», y selecciona «GrblUpload»)
- Compila y carga GRBL en tu Arduino. (1. Conecta tu Arduino Uno a tu ordenador. 2. Asegúrate de que tu placa está configurada como Arduino Uno en el menú «Tool->Board» y que el puerto serie está seleccionado correctamente en «Tool->Serial Port». 3. Haz clic en «Upload» y GRBL debería compilar y flashear en tu Arduino. Nota: el flasheo con un programador también funciona utilizando el comando del menú «Upload Using Programmer»).
3. Abre una conexión en serie con la placa Arduino y comprueba si GRBL se está ejecutando. (Usamos el emisor universal de código G para conectar con GRBL)
4. Los controladores de paso A4988 necesitan un ajuste de la tensión de referencia, lo vemos en detalle más adelante.
5. Probar cada zócalo del controlador de pasos individualmente es crítico.
- Asegúrate de que la alimentación externa de alto voltaje no está encendida o conectada.
- Conecte un motor paso a paso a la toma del controlador paso a paso que desea probar. Esto es muy importante porque los controladores paso a paso de Pololu están diseñados para aumentar la corriente hasta alcanzar la corriente necesaria para funcionar. Sin un motor paso a paso conectado no habrá nada que consuma la corriente y puedes acabar dañando el controlador paso a paso si se sobrecalienta en el proceso.
- A continuación, instala el driver del motor paso a paso asegurándote de que el pin de habilitación del driver se alinea con el pin de habilitación de la shield.
- Conecta la alimentación externa a la pantalla, asegurándote de que la conectas de la forma correcta. Si no se conecta correctamente se puede dañar el shield, los drivers del motor paso a paso y la placa Arduino.
- Envía un g-Code al eje que estás probando. El motor paso a paso debería moverse si todo funciona. (Ejemplo de GCode: «¿G1 X5? o «¿G1 X0? o «¿G1 Y5?»)
- Repite el proceso anterior con cada eje utilizando el mismo driver de pasos.(Probar con un driver reduce el riesgo de dañar varios drivers de pasos al mismo tiempo).
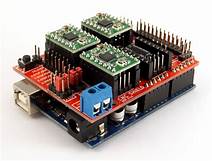
6. Una vez comprobado todo lo anterior, conecte todos los drivers y encienda el sistema.
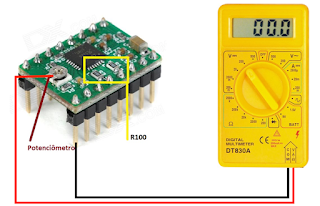
Ajuste del Límite de Corriente (Tensión de Referencia) para el Controlador de Pasos
A4988 vendido por Zyltech, Rs=0.1 ohm. Así la corriente máxima es Vref/0.4 Vref (Tensión de referencia) se mide con un multímetro en los puntos indicados
Drv 8825 vendido por Zyltech. Corriente máxima = Vref x 2
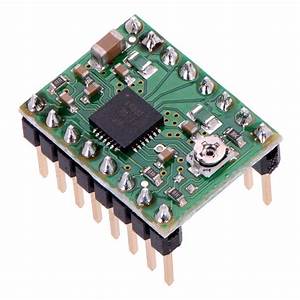
La tensión de referencia se ajusta con un pequeño destornillador en el punto indicado con la flecha blanca en la imagen de la derecha. Sugerimos ajustar la tensión de referencia en pequeños incrementos – no más de un cuarto de vuelta cada vez. Como punto de partida, puede ajustar la corriente máxima a 1A. Si el motor se calienta en exceso, reduzca la Vref. Si el motor no se mueve o pierde pasos, aumente la Vref.
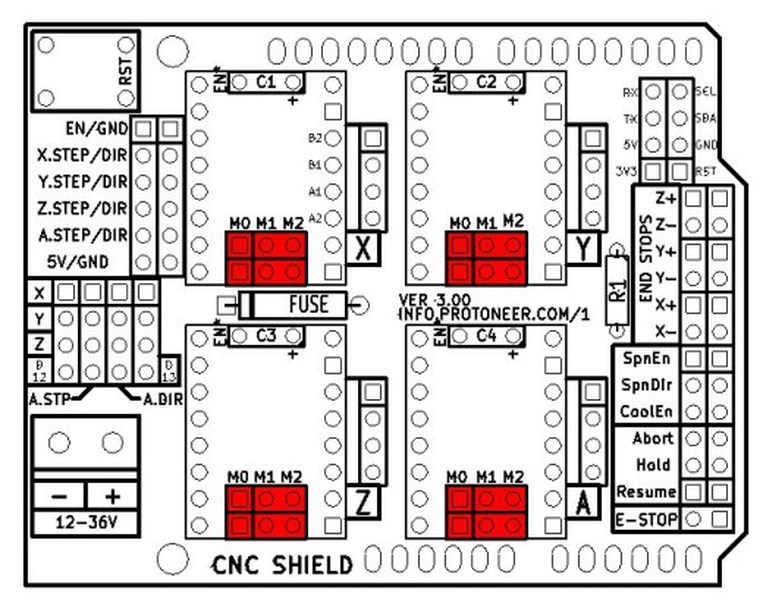
Configuración de los puentes
Los puentes se utilizan para configurar el 4º eje, la configuración de micropasos y de parada final.
Configuración del 4º eje
Usando dos puentes el 4º eje puede ser configurado para clonar el eje X o Y o Z. También puede funcionar como un eje individual utilizando el Pin Digital 12 para la señal de Stepping y el Pin Digital 13 como señal de dirección. (GRBL sólo soporta 3 ejes por el momento)
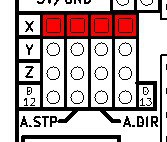
Clona el eje X al 4º driver de stepper
(marcado como A)
Clona el eje Y al 4º driver de stepper
(marcado como A)

clone-z-axis-orig.png
Clonar el eje Z al 4º controlador de pasos
(marcado como A)

d12-d13.png
Usar D12 y D13 para manejar el 4to driver de pasos
(marcado como A)

Configurar el micro paso a paso para cada eje
*En las tablas de abajo lo alto indica que hay un jumper insertado y lo bajo indica que no hay ningún jumper insertado.
Pololu DRV88


Valoraciones
No hay valoraciones aún.