






Descripción
NEMA 17
4 ó 6 cables.
Es un motor muy robusto ampliamente utilizando en Impresoras 3D o maquinas CNC de propósito general, aunque este es ligeramente más potente del recomendado para garantizar la mejor fiabilidad ! El bastidor tiene una parte plana para asegurar un mejor ajuste.
Este motor paso a paso NEMA 17 es bipolar, tiene un ángulo de paso de 1.8 º (200 pasos por vuelta) y cada bobinado es de 1.7 A ~ 12 V, capaz de cargar con 4 Kg / cm.
ESPECIFICACIONES TÉCNICAS
• Voltaje: 3 ~ 12 V
• Tipo: Bipolar
• Modelo: 17HS4401
• Angulo de paso: 1.8 º
• 200 pasos por vuelta
• Cuerpo de 42 mm
• Diámetro del eje 5 mm
• Longitud del eje 21 mm
• Corriente: 1.7 A
• Torque: 4000 g / cm
• No. de Cables: 4
• Conexiones: AZUL: B- / VERDE: A- ROJO: A+ / AMARILLO: B+
• Temperatura de trabajo – 20 °C ~ 50 °C
• Resistencia de la fase: 1.5 ohms
• Inductancia de la bobina: 2.8 mH
• Cables preparados para soldar
INCLUYE:
• 1 Motor Nema 17 17HS4401
• 1 Kit de Cables conductores azul verde rojo y amarillo (50cm)
• 1 Engrane
• 1 Base
• 1 Cable para tierra
Código
#define dirPin 2
#define stepPin 3
#define stepsPerRevolution 200
void setup() {
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 1 revolution slowly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
// Spin the stepper motor 1 revolution quickly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000);
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
//Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
}
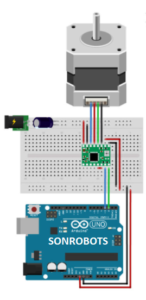
Diagrama
Necesitas un capacitor de 100uf y la fuente de poder para el motor.


Valoraciones
No hay valoraciones aún.